
Die Abteilung für Signalverarbeitung ist verantwortlich für den Signal- und Datenweg zwischen der Signalerzeugung durch die Sensoren und der Datenauswertung nach dem Flug oder während der Kalibrierung. Damit sind unsere physikalischen Schnittstellen zu anderen Systemen definiert als die Leitungen der Sensoren, die Verkabelung des Raketen Service Modules und die Anschlüsse der Bodenstation.
Es befinden sich zwei angeschlossene Signalverarbeitungseinheiten (SPUs, engl.: signal processing units) an Bord. Sie sind identisch (Software und Hardware), um somit die Komplexität und gleichzeitig den Platzbedarf für die Elektronik zu reduzieren, weil sie gestapelt werden können. Sie teilen sich die Stromversorgung und drei Signalleitungen, die vom Raketendienstmodul bereitgestellt werden, und können über zwei UART-Verbindungen (Empfangen und Senden) miteinander kommunizieren. Ein Lot-Jumper wird per Software ausgelesen und definiert den Modus, in dem sie betrieben werden, d.h. entweder Master oder Slave. Nur die Master-Mode-SPU wird direkt an das Service-Module angeschlossen und bedient somit die Telemetrie.
Insgesamt werden zwölf übereinander liegende biaxiale Dehnungsmessstreifen-Rosetten, deren Widerstand sich je nach Belastung des Moduls ändert, mit 16-Bit 2000 SPS (Samples per Second) Analog-Digital-Wandlern (ADCs) gemessen, die über eine Halbbrückenanordnung angeschlossen sind. Die gleichen ADCs werden in einer anderen Konfiguration verwendet, um die Temperatur an jedem Messpunkt zu quantifizieren. Es ist zwingend erforderlich, dass alle ADCs für die Dehnungsmessstreifen zur gleichen Zeit samplen. Das erreichen wir, indem wir auf dem gemeinsamen SPI-Bus aller DMS-ADCs beim Start ein Sync-Kommando absetzen. Diese tasten dann kontinuierlich die Differenzspannungen der Wheatstone-Brücke ab und werden von einem Mikrocontroller, einem STM32, ausgelesen.

Setup der Komponenten zur Signalerzeugung und -verarbeitung im HERMESS Modul.
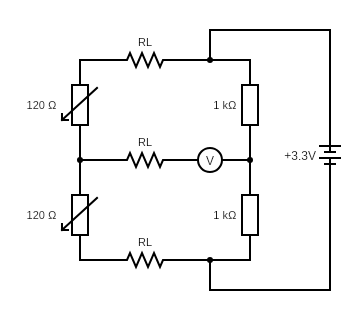 Schematische Darstellung der Wheatstoneschen Messbrücke.
Schematische Darstellung der Wheatstoneschen Messbrücke.
Die SPU enthält zwei 128MB NOR-Flash-Speichereinheiten. Auf diese wird über zwei verschiedene SPI-Schnittstellen des Mikrocontrollers getrennt zugegriffen. Damit kann eine höhere Zugriffsgeschwindigkeit und eine verbesserte Trennung zwischen Metadaten und Messdaten in der Datenstruktur erreicht werden.
Das Gehäuse der SPU besteht aus drei Hauptteilen, die vertikal zusammengeschraubt werden und zwischen denen sich jeweils eine Signalverarbeitungseinheit befindet. Die äußeren Ränder der SPU, die in Kontakt mit den Gehäuseteilen stehen, sind über die obere und untere Schicht leitend und ermöglichen so ein einheitliches Potential des gesamten Gehäuses. Somit bietet das Gehäuse nicht nur eine mechanisch robuste Befestigung der Elektronik im HERMESS-Modul, sondern auch einen Schutz gegen elektromagnetische Einflüsse.
Sehen Sie sich unser github repository für das Hardware-Design an.
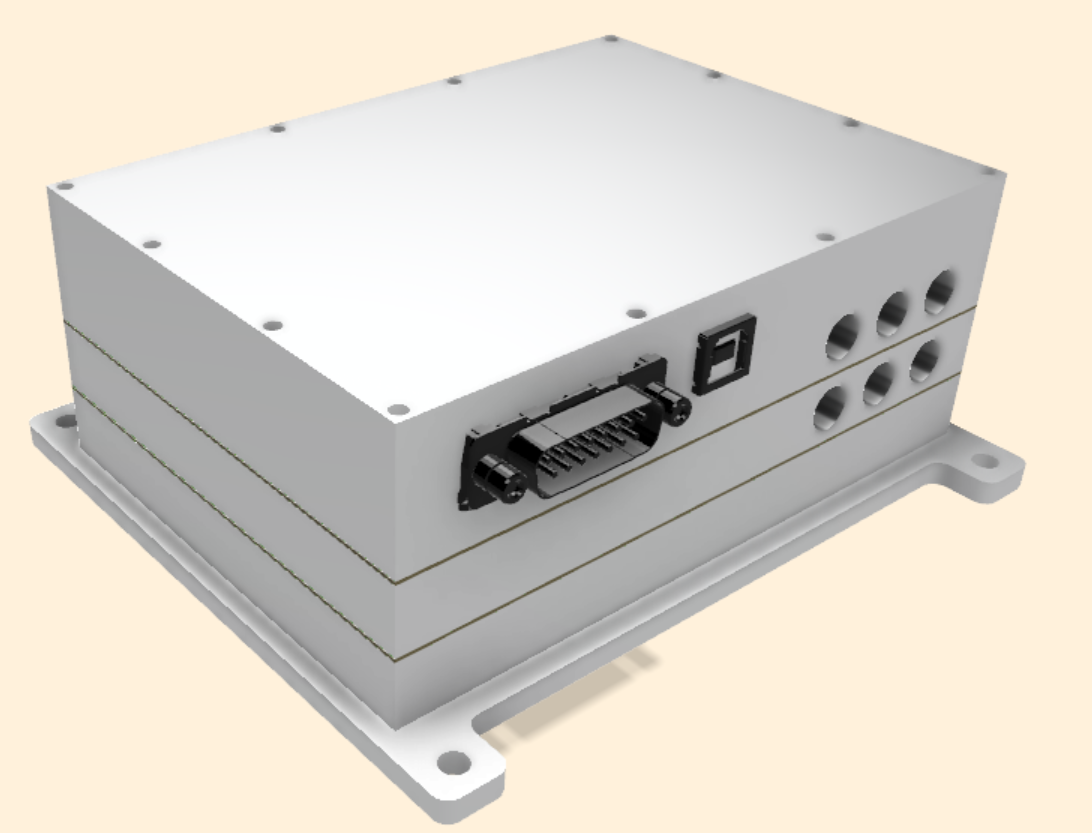 Gehäuse der Signalverarbeitungseinheiten.
Gehäuse der Signalverarbeitungseinheiten.
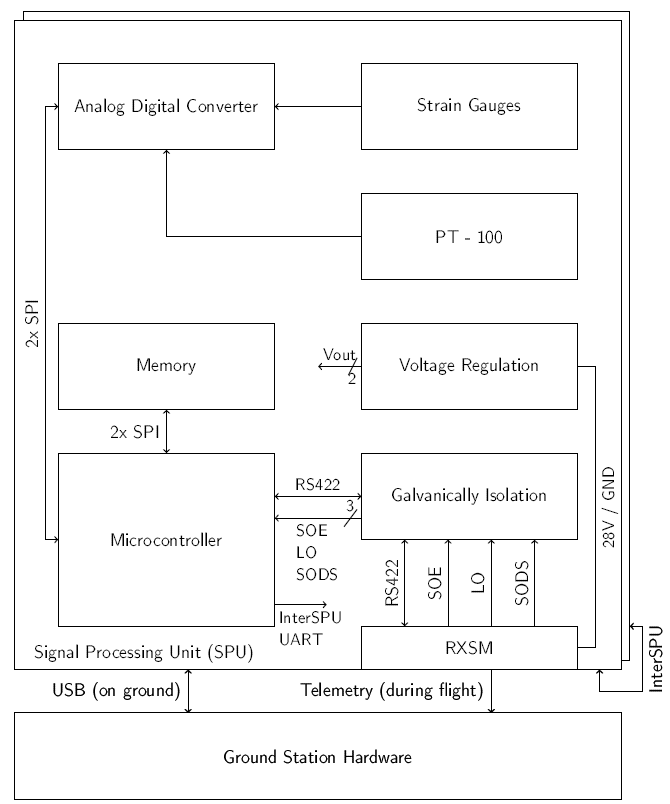 Blockdiagramm der Hardware-Komponenten und Schnittstellen.
Blockdiagramm der Hardware-Komponenten und Schnittstellen.
Da die beiden Signalverarbeitungseinheiten (SPUs) einen Mikrocontroller enthalten, der für die Erfassung, Speicherung und Weiterleitung der Messungen zuständig ist, wird eine für beide SPUs entwickelte Software benötigt, die diese Aufgaben erfüllt. Der Mikrocontroller, ein STM32, stellt den wichtigsten Akteur für dieses System dar. Zur Programmierung der Geräte wird C++ verwendet und der Quellcode ist öffentlich auf github verfügbar. Die Controller werden ohne Betriebssystem betrieben und folgen einem deterministischen Ablauf.
Die Telemetrie umfasst die Kommunikation mit unserer Bodenstation über die bereitgestellte Kommunikationsverbindung. Um mit einer festen Datenrate eine höhere Messauflösung senden zu können, sendet nur eine der beiden SPUs ihre Daten an die Bodenstation, was dazu führt, dass nur drei gleichmäßig verteilte Messpunkte übertragen werden. Dieser Anwendungsfall beinhaltet eine Komprimierung der Messungen und eine Fehlerbehandlung für eine spätere Fehlerkorrektur und -erkennung.
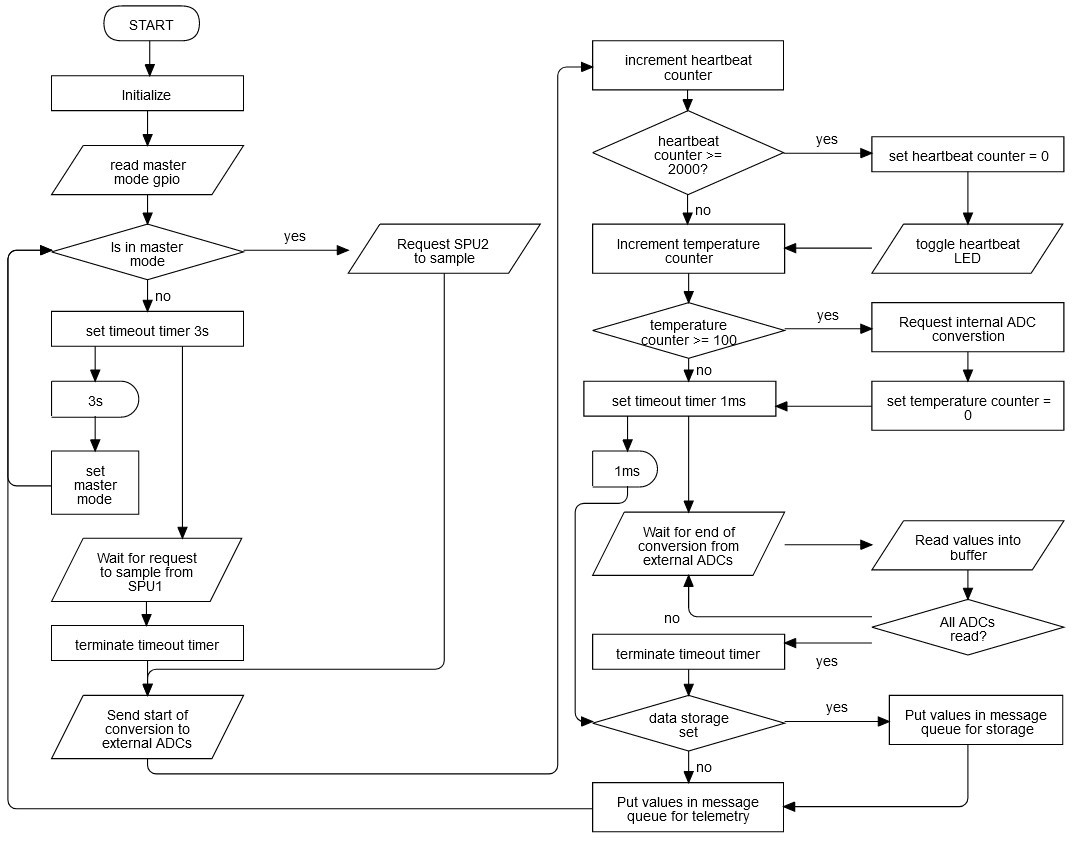 Flussdiagramm der HERMESS On-Board-Software.
Flussdiagramm der HERMESS On-Board-Software.
Diese Webseite verwendet Cookies
Um unsere Webseite für Sie optimal zu gestalten und fortlaufend verbessern zu können, verwenden wir Cookies. Um die Funktionen unserer Webseite vollumfänglich Nutzen zu können, willigen Sie bitte in deren Nutzung ein.
Notwendige Cookies helfen dabei, eine Webseite nutzbar zu machen, indem sie Grundfunktionen wie Seitennavigation und Zugriff auf sichere Bereiche der Webseite ermöglichen. Die Webseite kann ohne diese Cookies nicht richtig funktionieren.
| Name | Anbieter | Zweck | Ablauf |
|---|---|---|---|
| cookieinfo | Project HERMESS | Speichert die Benutzereinstellungen zu den Cookies. | 90 Tage |
| cms144-session | Project HERMESS | Eindeutige ID, die die Sitzung des Benutzers identifiziert. | Session |
Präferenz-Cookies ermöglichen einer Webseite sich an Informationen zu erinnern, die die Art beeinflussen, wie sich eine Webseite verhält oder aussieht, wie z. B. Ihre bevorzugte Sprache oder die Region in der Sie sich befinden.
| Name | Anbieter | Zweck | Ablauf |
|---|---|---|---|
| cms144-language | Project HERMESS | Speichert die vom Benutzer ausgewählte Sprachversion einer Webseite. | 90 Tage |
Cookies sind kleine Textdateien, die von Webseiten verwendet werden, um die Benutzererfahrung effizienter zu gestalten.
Laut Gesetz können wir Cookies auf Ihrem Gerät speichern, wenn diese für den Betrieb dieser Seite unbedingt notwendig sind. Für alle anderen Cookie-Typen benötigen wir Ihre Erlaubnis.
Diese Seite verwendet unterschiedliche Cookie-Typen. Einige Cookies werden von Drittparteien platziert, die auf unseren Seiten erscheinen.
Sie können Ihre Einwilligung jederzeit von der Cookie-Erklärung auf unserer Website ändern oder widerrufen.
Erfahren Sie in unserer Datenschutzrichtlinie mehr darüber, wer wir sind, wie Sie uns kontaktieren können und wie wir personenbezogene Daten verarbeiten.
Bitte geben Sie Ihre Einwilligungs-ID und das Datum an, wenn Sie uns bezüglich Ihrer Einwilligung kontaktieren.